







































































































































ERON雅朗 NABEYA 拔插操作型磁吸式夹具
品牌:ERON(雅朗)
型号:MPCP/MPCH系列
¥待询价(提交订单10分钟内获取专属报价单)

适用于少量多种或少品种大规模工件的自动化生产
自动化
对应机器
人高精度
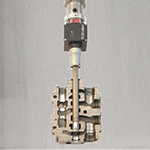
NEO自动化夹具(气压式) 符合RoHS
先端用钳口(抓爪型)…2个(仅限含钳口型)
阶梯式钳口(抓爪型)LT5AU75-SJG4(2个1组)…2组(仅限含钳口型)
定位用螺丝…2个
安装用六角螺丝…2个
●可根据工件尺寸,形状,更换各种钳口(部分为选购产品)
●钳口方向可以更改,增加开口长度。(最大时62mm→90mm)
●抓爪可以强力抓紧工件。
●重复精度可达±0.02。
●工件可一直固定在中心位置,节省装夹步骤。
●动作用气压的配管侧面和底面都可以。
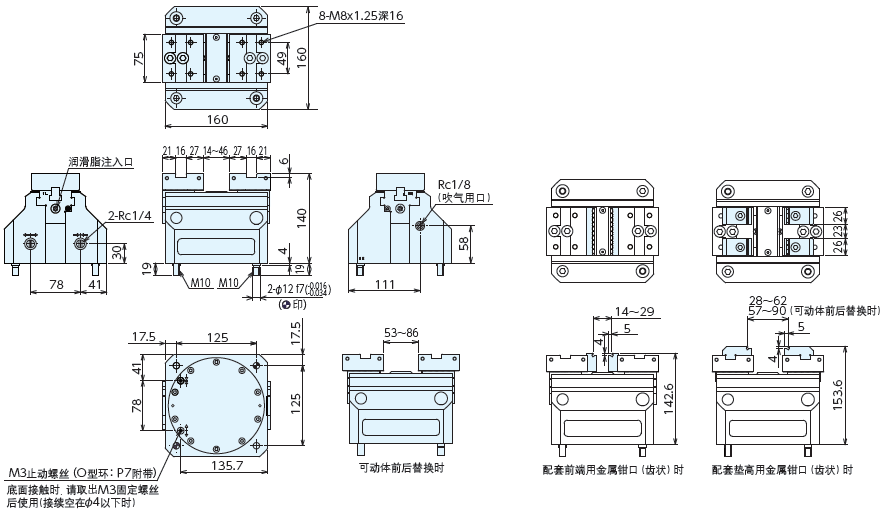
■规格
| 订单号 | 型号 | 类型 | 行程(单侧)mm | 夹紧力KN | 最大使用压力MPa | 重量Kg |
| 136861 | NEPG-75-160 | 气压式(带钳口) | 3 | 16KN(0.6MPa时) | 0.9 | 16.3 |
| 136863 | NEP-75-160 | 气压式 | 3 | 16KN(0.6MPa时) | 0.9 | 15.8 |
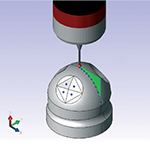
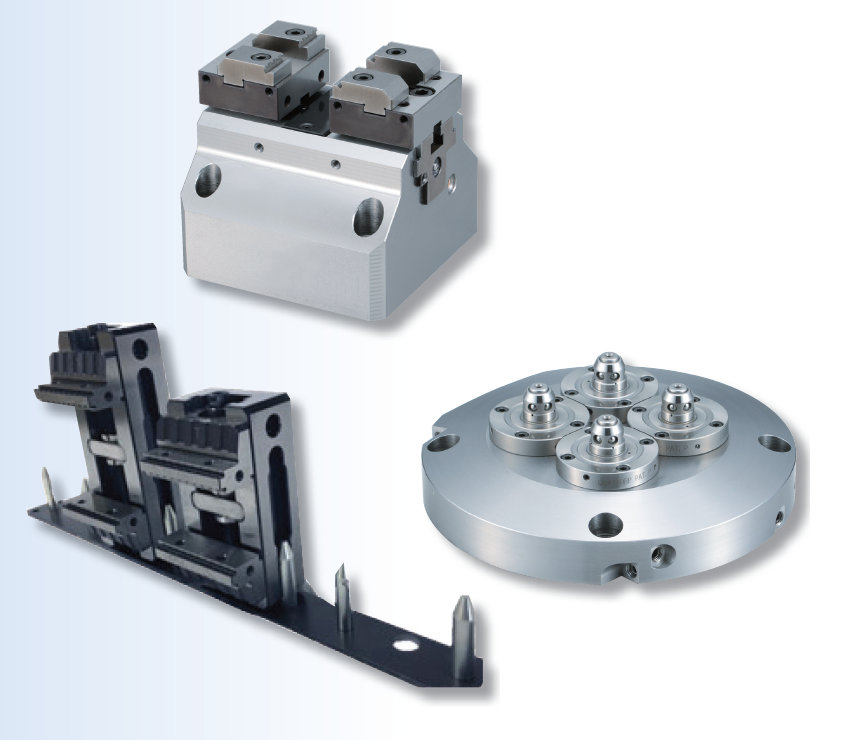
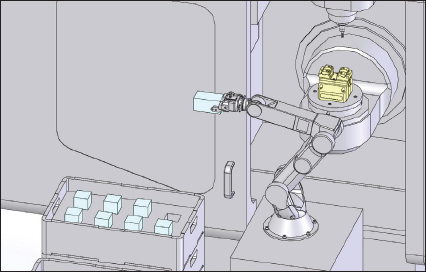
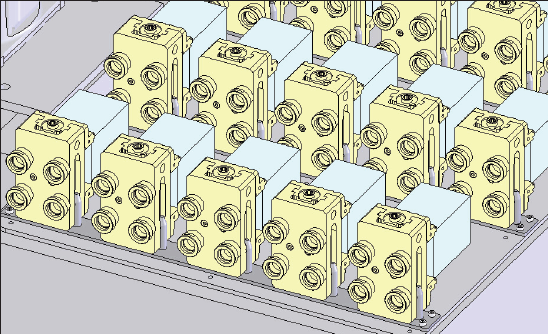
■使用例 (使用本产品进行自动化量产工件加工的示例图)
附带感应器的NEO自动化夹具(气压式) 符合RoHS

先端用钳口(抓爪型)…2个(仅限含钳口型)
阶梯式钳口(抓爪型)LT5AU75-SJG4(2个1组)…2组(仅限含钳口型)
定位用螺丝…2个
安装用六角螺丝…2个
●可根据工件尺寸,形状,更换各种钳口(部分为选购产品)
●钳口方向可以更改,增加开口长度。(最大时62mm→90mm)
●抓爪可以强力抓紧工件。
●重复精度可达±0.02。
●工件可一直固定在中心位置,节省步骤。
●动作用气压配管侧面和底面都可以。
●搭载标准2个圆柱接近开关:PE1-CS1R5D(富士电机机器制御有限公司制)、适合自动化自動化。接近开关的详细内容\请咨询公司的型录。
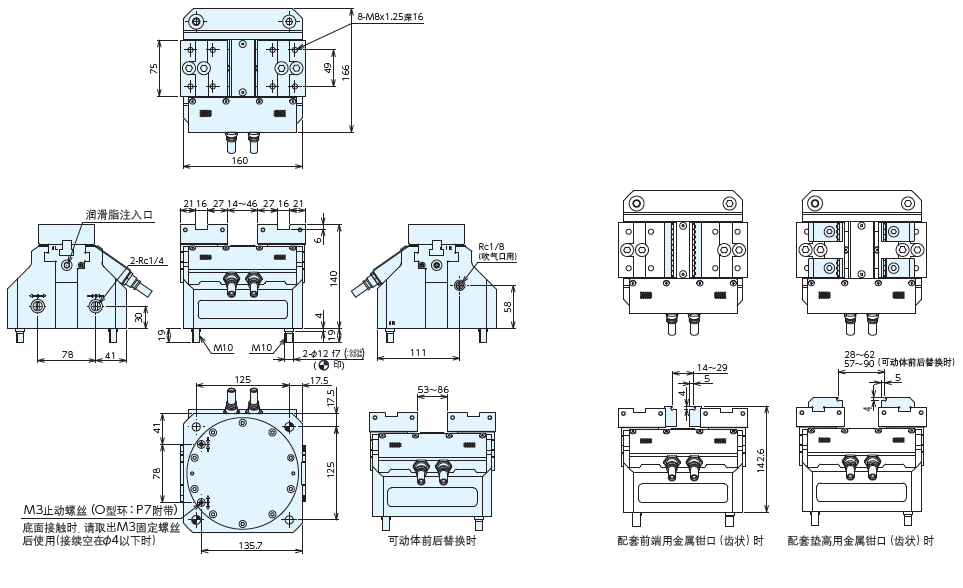
■规格
| 订单号 | 型号 | 类型 | 行程(单侧)mm | 夹紧力KN | 最大使用压力MPa | 重量Kg |
| 136865 | NEPGS-75-160 | 气压式(带钳口) | 3 | 16KN(0.6MPa时) | 0.9 | 16.3 |
| 136867 | NEPS-75-160 | 气压式 | 3 | 16KN(0.6MPa时) | 0.9 | 15.8 |
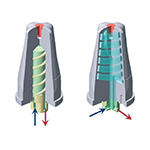
■传感器检出概念图
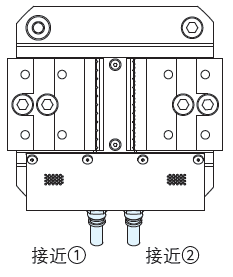
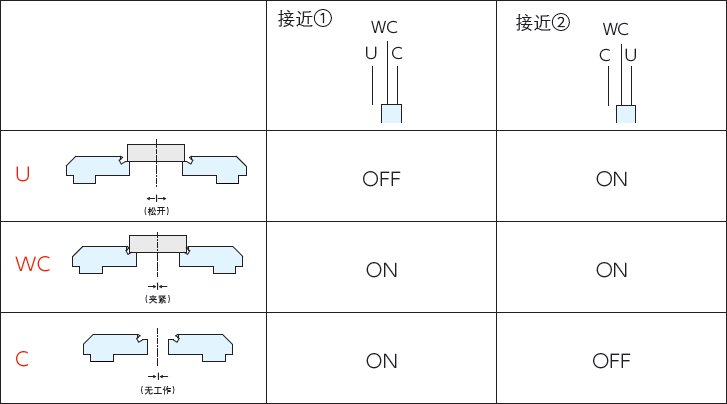
通过调整工件满足3种条件,以便通过内置传感器有效测量工件位置。
跟据工件尺寸的变化,有无法使用的情况。
NEO自动化夹具(气压式)用钳口 符合RoHS
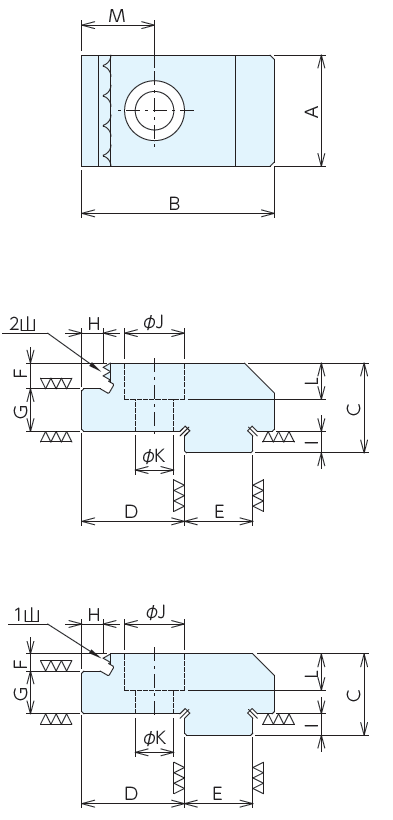
先端用钳口(齿状钳口型)
●适合想用抓爪强力抓紧的情况,最适合小工件的夹紧。
■规格
| 订单号 | 型号 | 抓齿层数 | A | B | C | D | E | F | G | H | I |
| 137316 | NE-75-SJG4-1 | 1 | 75 | 28 | 17 | 13 | 49 | 9 | 14 | 9 | 6 |
| 型号 | J | K | L | M | N | O | P | 数量 | 重量 |
| NE-75-SJG4-1 | 3 | 14 | 25 | 3 | 24 | 4 | 5 | 2个1组 | 0.1 |
台阶型钳口(齿状钳口型)
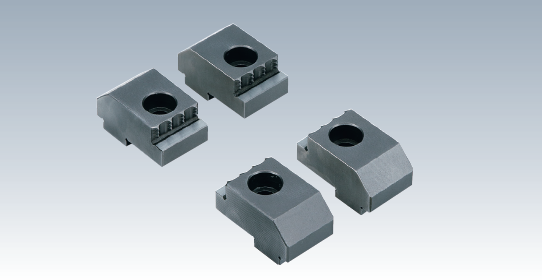
●适合想用抓爪强力抓紧的情况。
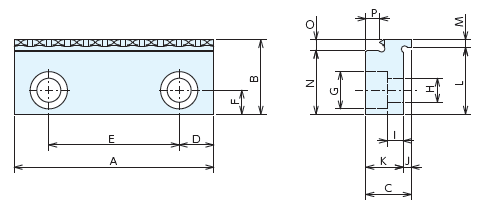
■规格
| 订单号 | 型号 | 适用平口钳 | 抓齿层数 | A | B | C | D | E | F |
| 124533 | LT5AU75-SJG4 | LT5AU-75(M,FM,F),NE***-75-160 | 1 | 26 | 45 | 19 | 24 | 16 | 4 |
| 124534 | LT5AU75-SJG6 | LT5AU-75(M,FM,F),NE***-75-160 | 2 | 26 | 45 | 21 | 24 | 16 | 6 |
| 993019 | LT5AU75-SJG8 | LT5AU-75(FM,F),NE***-75-160 | 3 | 26 | 45 | 23 | 24 | 16 | 8 |
| 型号 | G | H | I | J | K | L | M | 数量 | 重量Kg |
| LT5AU75-SJG4 | 10 | 5 | 5 | 14 | 9 | 8.5 | 17 | 2个1组 | 0.24 |
| LT5AU75-SJG6 | 10 | 5 | 5 | 14 | 9 | 8.5 | 17 | 2个1组 | 0.26 |
| LT5AU75-SJG8 | 10 | 5 | 5 | 14 | 9 | 8.5 | 17 | 2个1组 | 0.3 |
自切钳口
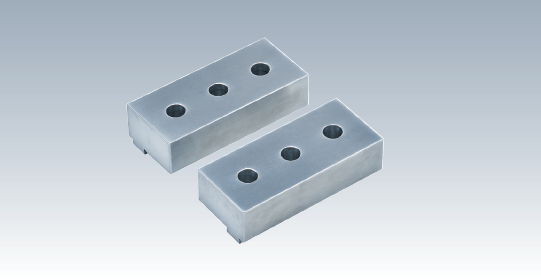
●根据工件形状夹紧,可以进行再次加工。
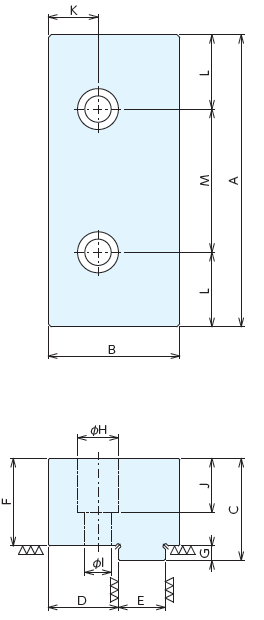
■规格( 2片1组)
| 订单号 | 型号 | 适用平口钳 | 材质 | A | B | C | D | E |
| 125634 | LT5AU-75SCJ-S | LT5AU-75(M,FM,F),NE***-75-160 | S45C | 100 | 55 | 35 | 34 | 16 |
| 125635 | LT5AU-75SCJ-A | LT5AU-75(M,FM,F),NE***-75-160 | A5052 | 100 | 55 | 35 | 34 | 16 |
| 型号 | F | G | H | I | J | K | L | M | 重量Kg |
| LT5AU-75SCJ-S | 30 | 5 | 14 | 9 | 18.5 | 27 | 25.5 | 49 | 2.6 |
| LT5AU-75SCJ-A | 30 | 5 | 14 | 9 | 18.5 | 27 | 25.5 | 49 | 1 |
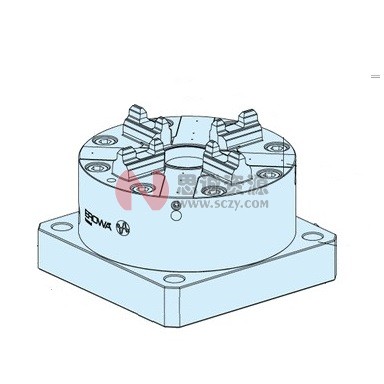
NEO自动化夹具(对应机器人搬运) 符合RoHS
NEO自动化夹具用垫高衬套(对应机器人搬运):4个
●钳口方向可以更改,增加开口长度。(最大时106mm→146mm)
●抓爪可以强力抓紧工件。
●重复精度可达±0.02。
●工件可一直固定在中心位置,节省步骤。
●采用对应机器人搬运的形状(本体侧面有机器手专用爪沟槽)。
●使用机器人搬运对应的NEO自动化夹具用垫高衬套(尺寸19)。
●安装有高精度定位的Q-LOCK定位元件(另售),可以实现自动装卸(气压动作)。
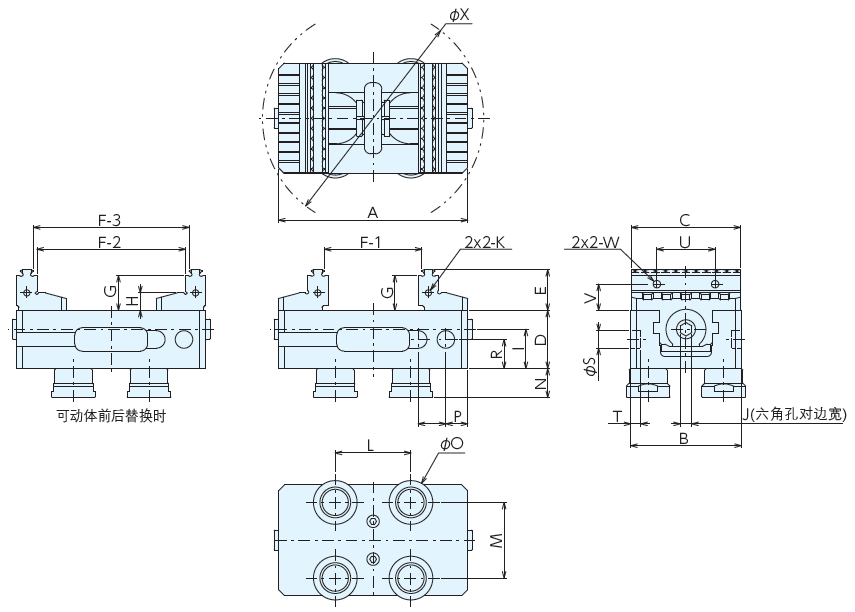
■规格
| 订单号 | 型号 | A | B | C | D | E | F-1 | F-2 | F-3 | G |
| 136869 | 5AUNE-75-130 | 130 | 76 | 75 | 40 | 28 | 10-66 | 60-101 | 65-106 | 24 |
| 136870 | 5AUNE-75-170 | 170 | 76 | 75 | 40 | 28 | 10-106 | 60-141 | 65-146 | 24 |
| 型号 | H | I | J | K | L | M | N | O | P | Q |
| 5AUNE-75-130 | 12 | 27 | 8 | M5 | 52 | 52 | 20 | 30 | 15 | 19 |
| 5AUNE-75-170 | 12 | 27 | 8 | M5 | 52 | 52 | 20 | 30 | 15 | 19 |
| 型号 | R | S | T | U | V | W | X | 夹紧力kN | 重量Kg |
| 5AUNE-75-130 | 20 | 12 | 7 | 40 | 18 | M6 | 152 | 14 | 3.2 |
| 5AUNE-75-170 | 20 | 12 | 7 | 40 | 18 | M6 | 186 | 14 | 3.8 |
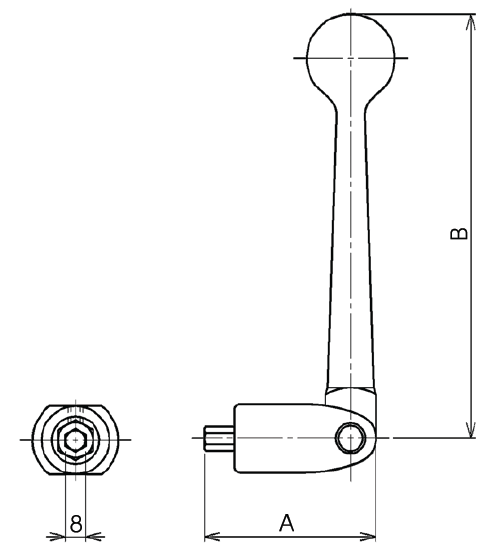
| 订单号 | 型号 | A | B | 六角对变宽 |
| 131910 | 5AU-8HN176 | 68 | 168 | 8 |
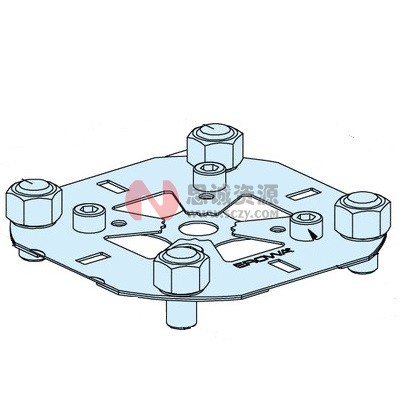
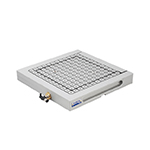
NEO自动化夹具(对应机器人搬运)用底板安装单元 符合RoHS
底板: S45C 秒速定位元件: SUS440C
●加工中心或转台等安装专用底板安装单元。
●使用秒速定位元件尺寸19(气压双动)( 切入磨削)
●本产品使用与机器人搬运对应的NEO自动化夹具,可以实现自动化必要的夹紧力与定位。
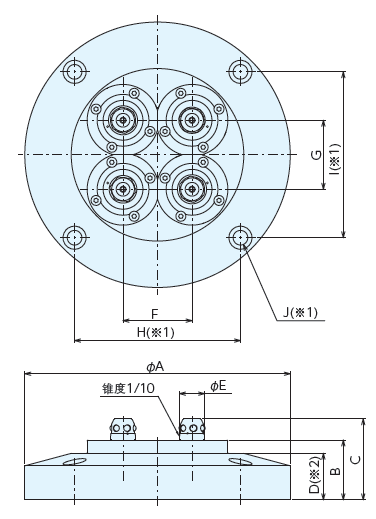
※2 D的尺寸根据H,I,J的变化也存在变动的可能
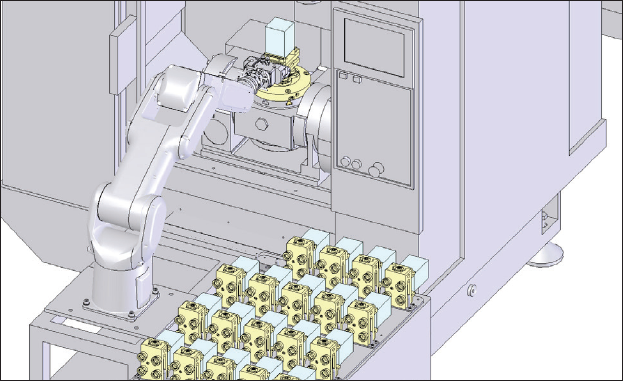
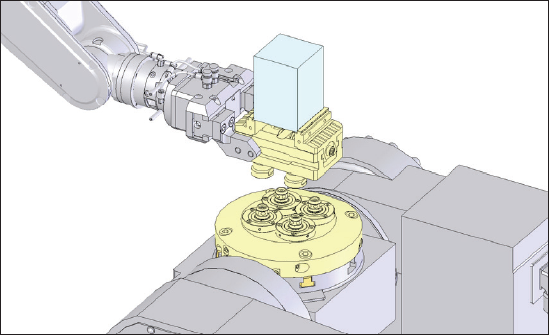
■使用例 (将本产品加入两轴RT的示例)
■规格
| 订单号 | 型号 | A | B | C | D | E | F | G | 夹紧力KN | 重量Kg |
| 136871 | 5AUNE-75-BU200 | 200 | 45 | 61 | 35 | 19 | 52 | 52 | 4(0.5MPa时) | 7.8 |
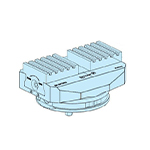
NEO自动化夹具(对应机器人搬运)用仓储用单元 符合RoHS
●本产品对应机器人搬运的NEO自动化夹具,使用机器人可进行NEO自动化夹具简单的固定。
●仓储用单元仅用4个螺母固定,可以简单的添加或减少。
●一个仓储单元最多可以放置5台机器人搬运用NEO自动化夹具。
●机器人搬运用NEO自动化夹具130,170都可以对应。
■使用例
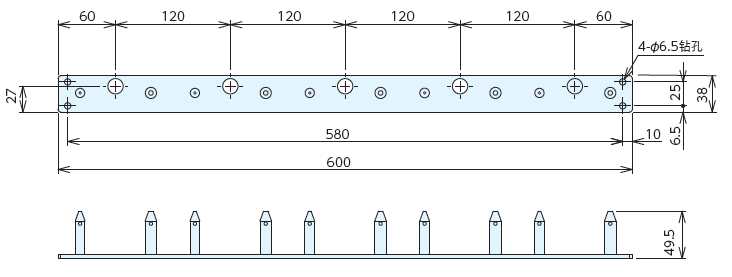
■规格
| 订单号 | 型号 | 适用安装螺栓(另售) | 重量Kg |
| 136872 | 5AUNE-75-SU | M5×10 | 1.2 |
机器手专用爪<NEO自动化夹具机器人搬运用> 符合RoHS
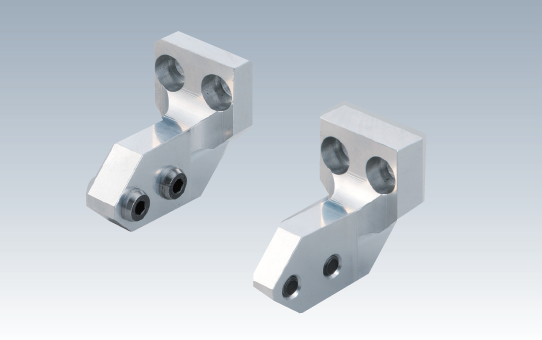
爪安装用螺丝:4个(机器手型号不同)
爪定位用钥匙:2个(仅限一部分厂家)
●可对应三家机器手厂家。
●可对应搬运重量4种(7kg,12kg,20kg,25kg)的机器人。(注:实际可搬工件的重量)
●使用高强度铝材料,轻量且高刚性。
●机器手的款式对应专用设计爪,并无繁琐的设计。
●本产品对应机器人搬运的NEO自动化夹具,使用机器人可进行NEO自动化夹具简单的固定。
■规格(※1)
| 机械手制造商 | 机械手型号 | 机械手重量kg | 订单号 | 型号 | 重量kg |
| ZiMMER (锅屋百迪克) |
GPP5010N | 0.9 | 136873 | 5AUNE-75-HCZS10 | 0.09 |
| GPP5013N | 1.5 | 136874 | 5AUNE-75-HCZS13 | 0.1 | |
| GPP5016N | 2.9 | 136875 | 5AUNE-75-HCZS16 | 0.15 | |
| 雄克 | PGN-plus100-1 | 1.1 | 136873 | 5AUNE-75-HCZS10 | 0.09 |
| PGN-plus125-1 | 1.9 | 136874 | 5AUNE-75-HCZS13 | 0.1 | |
| PGN-plus160-1 | 3.4 | 136875 | 5AUNE-75-HCZS16 | 0.15 | |
| 近藤制作所 | HHC-50AS | 0.7 | 136876 | 5AUNE-75-HCK50 | 0.09 |
| HHC-63AS | 1.1 | 136877 | 5AUNE-75-HCK63 | 0.09 | |
| HHC-80AS | 2.3 | 136878 | 5AUNE-75-HCK80 | 0.15 |
本产品,为株式会社NABEYA的产品,与ZiMMER(锅屋百迪克),雄克,近藤制作所没有关系。
5AUNE-75-130使用时最大的工件重量kg
| 机器人可搬 运重量kg |
ZiMMER(锅屋百迪克) | 雄克 | 近藤制作所 | ||||||
| GPP5010N | GPP5013N | GPP5016N | PGN-plus100-1 | PGN-plus125-1 | PGN-plus160-1 | HHC-50AS | HHC-63AS | HHC-80AS | |
| 7 | 2.5 | 2 | - | 2.3 | 1.5 | - | 2.7 | 2.3 | 1.2 |
| 12 | 7 | 7 | 5 | 7 | 6 | 5 | 7 | 7 | 6 |
| 20 | 15 | 15 | 13 | - | 14 | 13 | 15 | 15 | 14 |
| 25 | - | 20 | 18 | - | 19 | 18 | 20 | 20 | 19 |
5AUNE-75-170使用时最大的工件重量kg
| 机器人可搬 运重量kg |
ZiMMER(锅屋百迪克) | 雄克 | 近藤制作所 | ||||||
| GPP5010N | GPP5013N | GPP5016N | PGN-plus100-1 | PGN-plus125-1 | PGN-plus160-1 | HHC-50AS | HHC-63AS | HHC-80AS | |
| 7 | 1.9 | 1.3 | - | 1.7 | 1 | - | 2 | 1.8 | - |
| 12 | 7 | 6 | 5 | 6 | 6 | 4 | 7 | 6 | 5 |
| 20 | - | 14 | 13 | - | 14 | 12 | 15 | 14 | 13 |
| 25 | - | - | 18 | - | - | 17 | - | 19 | 18 |
※2.注意事项
・搬运时的加减速度为1m/S2计算。
・机器手用更换器,不考虑适配器的重量。
・记载数值为参考值,根据使用条件有可能低于记载数值以下。实际条件请根据客户确认。
思诚资源为您提供:ERON-NABEYA雅朗 NEO自动夹具/机器手夹具的采购报价、ERON(雅朗)G5D4BE2BDCE705型号参数、规格图片、PDF画册等资料,如您想了解更多关于ERON(雅朗)正品品牌的其他加工夹具资料与产品货期库存、行情价格,就在思诚资源MRO商城。
备注:因厂家会在没有任何提前通知的情况下更改产品包装、产地或者一些附件,本公司不能确保客户收到的货物与思诚资源网站提供的产品图片、产地、附件说明等完全一致。若本网站没有及时更新,敬请谅解!